嵌入式系统设计知识点
基于Cortex-A9微处理器的硬件平台
RISC和CISC
RISC是精简指令集计算机,CISC是复杂指令集计算机
RISC(精简指令集计算机,Reduced Instruction Set Computer)和CISC(复杂指令集计算机,Complex Instruction Set Computer)是两种不同的计算机架构设计理念,它们在指令集的复杂性、指令执行方式、硬件实现等方面有所区别。以下是RISC和CISC的主要特点及其区别:
- RISC(精简指令集计算机)
- 指令集简单:RISC架构拥有较少的指令,通常每个指令执行一个简单的操作。
- 指令执行快速:由于指令简单,大多数RISC指令可以在单个时钟周期内完成。
- 寄存器丰富:RISC架构通常具有更多的寄存器,以减少对内存的访问次数。
- 流水线执行:RISC处理器设计易于实现流水线技术,提高指令吞吐率。
- 编译器优化:RISC架构依赖编译器将复杂操作转换为一系列简单的指令。
- CISC(复杂指令集计算机)
- 指令集复杂:CISC架构拥有大量的指令,包括一些执行复杂操作的指令。
- 指令执行较慢:CISC指令可能需要多个时钟周期来完成。
- 寄存器较少:CISC架构通常具有较少的寄存器,更多依赖内存访问。
- 微指令执行:CISC处理器可能使用微指令(microcode)来实现复杂指令。
- 硬件复杂性:CISC处理器的硬件设计相对复杂,以支持广泛的指令集。
区别
- 指令集大小:RISC的指令集较小,CISC的指令集较大。
- 指令复杂性:RISC指令简单,CISC指令复杂。
- 执行速度:RISC指令通常执行更快,CISC指令执行可能较慢。
- 硬件设计:RISC处理器设计相对简单,CISC处理器设计复杂。
- 内存访问:RISC架构倾向于减少内存访问,CISC架构可能更频繁地访问内存。
- 依赖编译器:RISC架构更依赖编译器优化,CISC架构则在硬件层面提供复杂操作。
ARM处理器支持的基本数据类型
数据类型:字、半字、字节。
说明:
- 一个字节占8位,半个字节占16位,一个字占32位;
- 在存储数据时,字要按照4个字节来存储,所以每一次存时地址都加4,地址末位是00,例如0x13FFFFF8,0x13FFFFFC,
- 在存储数据时,半字要按照2个字节来存,所以每一次存时地址都加2,地址末位是0,例如0x13FFFFF4,0x13FFFFF6,;
ARM处理器的工作状态
主要有两种状态,主要区别就是执行的指令集位数不同;
- Thumb状态,微处理器执行16位的半字对齐的Thumb指令集,Thumb指令集是从ARM微处理的第四个版本开始增加(v4T);
- ARM状态,微处理器执行32位的字对齐的ARM指令集。
ARM存储格式
-
大端格式:高字节存储在低地址,低字节存储在低地址;
-
小端格式:高字节存在高地址,低字节存储在低地址; 说明:
-
对高字节和低字节可以这样理解,假设有一个32位的地址为0x13FFFFF1,它的高字节是31,也可以理解成最高那一位的下标,31这一位存了0,低字节是0存了1。把这个理解带入上面的大端格式,小端格式。
ARM处理器寄存器
- 共有40个32位的寄存器,其中33个通用寄存器,7个状态寄存器;
- 通用寄存器
- 未分组寄存器(R0-R7);
- 分组寄存器(R8-R14);
- ARM处理器的程序状态寄存器包括:CPSR(当前程序状态寄存器)和SPSR(程序状态备份寄存器)
中断
ARM工作模式
-
用户模式(usr):应用程序执行状态。
-
快速中断模式(fiq):用于高速数据传输或通道处理。
-
外部中断模式(irq):用于通用的外部中断。
-
特权模式(svc):操作系统使用的保护模式。
-
数据访问中止模式(abt):当数据或指令预取终止时进入该模式,可以用于虚拟存储及存储保护。
-
未定义指令中止模式(und):当未定义的指令执行时进入该模式,可用于支持硬件协处理器的软件仿真。
-
系统模式(sys):运行具有特权的操作系统任务。
-
监控模式(mon):可在安全模式与非安全模式之间转换。
-
执行程序什么模式?
-
读指令并执行,读取未定义指令什么模式?
-
遇到特权任务什么模式?
-
遇到中断什么模式?
-
指令执行结束什么模式?
3级、5级流水线
- 3级流水线指令可以分解成取指令、编译、执行;
- 5级流水线指令可以分解成取指令、编译、执行、缓冲、写回。
程序状态寄存器
-
CPSR中的[31:27]为条件标志位,具体含义如下:
- N:符号标志位。当用两个补码表示的带符号数进行运算时,N=1表示运算的结果为负数;N=0表示运算的结果为正数或零。
- Z:结果是否为0的标志。Z=1,表示运算结果为0;Z=0,表示运算结果为非0。
- C:进位或借位标志位。加法运算结果产生了借位时C=1,减法运算产生了借位时C=1,否则为0;包含移位操作的非加/减运算指令,C为移出值的最后一位;其他运算指令,C的值通常不变。
- V:溢出标志位。对于加减法运算指令,V=1表示符号位溢出,其它指令的影响V位。
-
CPSR中的[7:0]为控制位,具体含义如下:
- I:IRQ中断使能位;
- F:FIQ中断使能位;
- T:处理器运行状态控制位;
- M[4:0]:运行模式位。
-
其它标志位。
ARM指令集条件域
- EQ:相等,(CPSR)Z=1;
- GT:大于,Z=0&&N=Z;
- TF:小于等于,Z=1||N=Z;
寻址指令
数据处理指令
- RSB 逆向减法,例如:
RSB Rd Rn op2 ;op2-Rn赋值给Rd-
MUL 32位乘法,
-
CMP 比较,例如
CMP Rn op2 ;Rn-op2-
MOV指令:它的传送指令只能是把一个寄存器的值(要能用立即数表示)赋给另一个寄存器,或者将一个常量赋给寄存器,将后边的量赋给前边的量
-
ADD指令:ADD指令用于把两个操作数相加,并将结果存放到目的寄存器中。
-
SUB指令:SUB指令用于把操作数1减去操作数2,并将结果存放到目的寄存器中
SUB r0, r1, r2 ; r0 = r1 - r2
SUB r0, r1, #256
SUB r0, r2, r3, LSL#1 ; r0 = r2 - (r3 << 1)- LDR指令:LDR指令用于从存储器中将一个32位的字数据传送到目的寄存器中.
用法1: LDR r0, =0x20000000 用法2: LDR r0, =0x30000000
- STR指令:STR指令用于从源寄存器中将一个32位的字数据传送到存储器中。即:将前边的量赋值给后边的量。
STR r0,[r1] ; 将r0中的字数据写入以r1为地址的存储器中
STR r0,[r1], #8 ; 将r0中的字数据写入以r1为地址的存储器中,并将新地址r1+8写入r1。
STR r0,[r1, #8] ; 将r0中的字数据写入以r1+8为地址的存储器中。跳转指令
案例1
CMP R0, #0
MOVEQ R1, #0
MOVGT R1, #1
解:CMP R0, #0 ; 将R0的值减去0,并根据结果设置CPSR的标志位
MOVEQ R1, #0 ; 若R0等于0,Z=1,则将立即数0装入到R1
MOVGT R1, #1 ; 若R0大于0,Z=0,N=V,则将立即数1装入到R1程序实现的功能是判断R0的值与0的关系,将结果装入R1,若R0=0则R1=0,若R0>0则R1=1.用C语言描述如下。 设R0对应变量a,R1对应变量b,
if(a==0)
b=0;
else if(a>0)
b=1;
案例2
对程序各条指令进行注释,最后分析整个程序的功能。
AREA Example1,CODE,READONLY ; 声明代码段Example1
ENTRY ; 标识程序入口
CODE32 ; 声明32位ARM指令
START ; 标号/标签
MOV R0, #0 ; 设置参数,R0=0
MOV R1, #10 ; 设置参数,R1=10
LOOP ; 标号/标签
BL ADD_SUB ; 调用子程序ADD_SUB
B LOOP ; 跳转到LOOP
ADD_SUB ; 标号/标签
ADDS R0, R0, R1 ; R0 = R0 + R1,并根据结果设置CPSR的标志位
MOV PC, LR ; 子程序返回,PC=LR
END ; 声明文件结束整个程序的功能:程序实现了一个死循环,每次循环R0都增加10。
LInux编程基础
GCC编译的4个过程的主要功能
- 预编译:主要功能是读取源文件,并对头文件预编译语句和一些特殊符号进行分析和处理;
- 编译:主要包括检查代码语法和将预编译后的文件转换成汇编语言;
- 汇编:主要的功能是将汇编语言的代码编程目标文件;(机器代码,0和1)
- 连接:主要功能是连接代码,生成可执行文件。
简述Make工具和Makefile的基本结构
Make又叫工程管理工具,即管理较多的工程文件。
主要的功能:
- 通过Makefile文件来描述源程序之间相互依赖的关系,并自动完成维护编译工作;
- 能够根据文件的时间戳发现更新的文件,可以减少编译工作;
基本结构:
target : dependency
<tab 键> commandtarget:目标; dependency:依赖关系 command:命令
Makefile变量
- 用户自定义变量
- 预定义变量
- 自动变量
后两个是系统的变量,是Makefile文件常用的变量,其中有部分变量用户可以修改。
预定义变量
需要记住两个比较重要且常用的预定义变量,即
- CC:C编译器名称,默认cc
- CFLAGS:C编译器的选项,无默认值
自动变量(又叫系统变量)
- $@ :规则的目标所对应的文件;
- $<:规则中的第一个依赖文件;
- $^:规则中所有依赖的列表,以空格为间隔符。
文件操作编程
C语言库中的fopen、fclose、fwrite、fread等函数。
其实是由操作系统的API函数封装而来,如
- fopen内部其实调用的是open函数,
- fwrite内部调用的是write函数。
用户也可以直接利用Linux系统的API函数来完成文件操作编程
在Linux操作系统下,用C语言实现文件操作可以采用哪两种方法?
在LInux操作系统中,实现文件操作有两种方法,第一种是调用C语言标准库,第二种是通过Linux系统调用实现。前者独立于操作系统,在任何操作系统下使用C语言标准库函数操作文件,而后者以来于操作系统。
时间编程
- time函数
返回1970.1.1 0时到现在所经历的时间,操作失败返回((time_t)-1)
- gmtime函数 将日历转化为格林威治标准时间,结果存在结构体tm中。
在课堂上老师叫我们使用的并非上面这个函数,而是用localtime(const time_t *timep)这个函数,这个函数可以将日历转为本地时间,具体用法请看综合案例
- gettimeofday函数
获取从今日凌晨到现在的时差并存储在tv中,tz存放当地时区差;
综合案例
(4)编写一个程序,将系统时间以“year-month-day hour:minute:second”格式保存在time.txt文件中。
#include<stdio.h>
#include<string.h>
#include<fcntl.h>
#include<time.h>
#define MAX 40
int main()
{
int fd,n,ret;
char writebuf[MAX];
struct tm *t;
time_t lt;
lt=time(NULL);
t=localtime(<); //将日历时间转化为本地时间
sprintf(writebuf,"%d-%d-%d %d:%d:%d\n",t->tm_year+1900,t->tm_mon+1,t->tm_mday,t->tm_hour,t->tm_min,t->tm_sec); //按指定格式保存时间
/*打开文件,如果文件不存在,则会创建文件*/
fd = open("time.txt", O_RDWR | O_CREAT);
/*向文件写入字符串*/
ret = write(fd, writebuf, strlen(writebuf));
if (ret < 0){
perror("Write Error!"); return 1;
}
else
{
printf("write %d characters!\n", ret);
}
/*关闭时,会自动保存文件*/
close(fd);
}多线程编程
基本用法
使用到pthread_createh头文件,以及libpthread.so和libpthread.a库文件;
- pthread_create函数:创建线程
- pthread_exit函数:退出线程
- pthread_join函数:阻塞线程
互斥锁线程
解决多个线程在一起执行的时候共享数据、资源的问题。在POSIX中有两种线程同步机制,分别为互斥锁和信号量
- pthread_mutex_init:初始化互斥锁
- pthread_mutex_lock:互斥锁上锁
- pthread_mutex_unlock:互斥锁释放
嵌入式开发交叉编译与系统移植
嵌入式软件调试方法
- 实时在线仿真
- 模拟调试
- 软件调试
- 片上调试
引导程序移植
操作系统运行前的一个程序,也就是启动程序。
- BoolLoader工作模式
- 启动加载模式
- 下载模式
- BoolLoader启动过程
- 第一阶段
- 主要依赖CPU的体系结构硬件初始化的代码,通常使用汇编语言编写。
- 这个阶段的功能主要有:
- 基本硬件设备初始化;
- 为第二阶段准备ARM空间;
- 复制BootLoader的第二阶段代码到RAM;
- 设置栈堆;
- 跳转到第二阶段的入口点;
- 第二阶段
- 通常使用C语言完成,以便实现更复杂的功能,使程序具有更好的可读性和可移植性。
- 这一阶段的主要任务是:
- 初始化这一阶段要使用的硬件设备;
- 检测系统内存映射;
- 将内核文件和根目录系统映像文件从Flash读到RAM;
- 为内核设置启动参数,
- 调用内核。
- 第一阶段
常用的启动文件有很多,这里介绍Uboot。
Uboot是一个开源项目,最早是由德国登克斯(DENX)小组的开发,然后发布在网上,许多对这款软件感兴趣的开发人员共同来维护。
BootLoader的核心任务是什么?
启动内核,向内核提供启动参数,完成系统软件的部署功能。
系统加电后执行的第一段代码是什么?
BootLoader(引导程序)是系统上电后运行的第一段代码。
U-Boot命令和环境变量
U-Boot通常支持几十个常用命令,通过这些命令,可以对目标机进行调试,也可以引导Linux内核,还可以擦写Flash完成系统部署等功能。
- 常用命令: print: 通常用于打印信息或变量的值到控制台或终端。
setenv: 设置环境变量。环境变量是在操作系统中存储的配置信息,可以影响程序的行为。
saveenv: 保存环境变量。这个命令通常用于将当前的环境变量设置保存到非易失性存储器,以便在系统重启后保持这些设置。
ping: 网络诊断工具,用于测试主机之间的网络连接是否可达。
tftp: Trivial File Transfer Protocol(简单文件传输协议)的缩写,用于在设备之间传输文件。
boot: 启动系统或加载执行程序。
- 组合命令
- movi read:用来读取iNand到DDR上
- movi write:用来将DDR写到到iNand上
注释:
- 非易失性存储器 iNand
- 动态数据随机存取存储器 DDR
linux内核简介
Linux内核主要功能有:
- 进程管理
- 内存管理
- 文件管理
- 设备管理
- 网络管理
Linux内核源代码非常庞大,它使用目录树结构,内核源码的顶层有许多子目录,分别组织存放各种内核子系统或者文件,如下表:
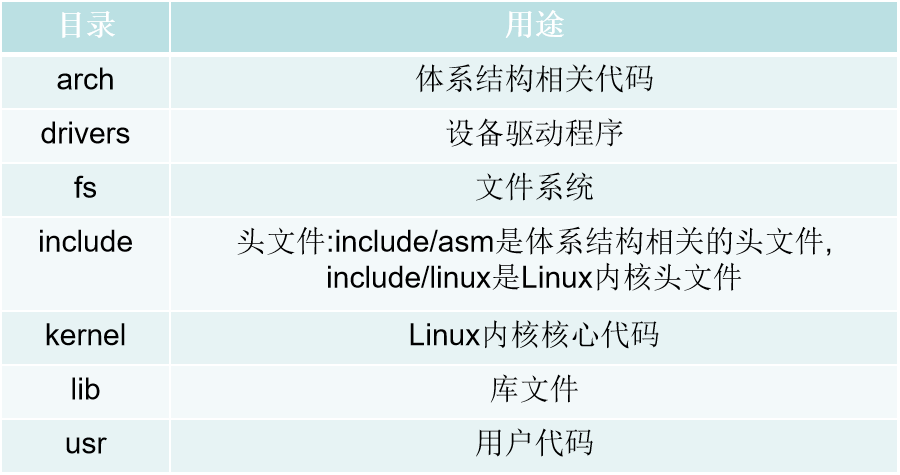
Linux内核移植
Linux内核支持多种处理器,如果目标机使用的是ARM处理器核,使用的交叉编译工具链是arm-linux-,内核移植时要指定处理器的类型以及使用的交叉编译工具链,简述具体操作方法。
具体操作如下。 打开内核顶层目录下的Makefile文件,在文件中找到如下内容。 ARCH?=$(SUBARCH) CROSS_COMPILE?=$(CONFIG_CROSS_COMPILE:“%”=%) 将找到的以上代码修改为如下内容。 ARCH?=arm CROSS_COMPILE?=arm-none-linux-gnueabi- 其中,ARCH是CPU架构变量;CROSS_COMPILE是交叉编译工具链变量。修改完成后,保存文件退出。
驱动程序
驱动程序的功能
- 对设备初始化和释放
- 数据传输:把数据从内核传送到硬件和从硬件读取数据,读取应用程序传送给设备文件的数据和回送应用程序请求的数据.
- 检测和处理设备出现的错误
Open入口点
对象:字符设备文件; 特点:字符设备文件都需要经过open入口点调用 open子程序功能:为I/O口作必要的准备工作 同一时刻只能有一个程序访问此设备(即设备是独占的),则 open子程序必须设置一些标志以表示设备处于忙碌状态。open子程序的调用格式如下。 int open(char * filename,int acess)
第一个功能中
打开设备是由调用定义在incliude/linux/fs.h中的file_operations结构体中的 open()函数完成的。open()函数主要完成的主要工作:
1.若是首次打开,先初始化 2.增加设备的使用计数 3.检测设备是否异常,及时发现设备相关错误 4.读取设备次设备号。
驱动程序的主要组成部分
- 自动配置和初始化子程序:检测驱动的硬件设备是否正常,能否正常工作
- 服务子程序和中断服务程序:这两者分别是驱动程序的上下两部分。
- 驱动上部分,即设备服务子程序,它是系统调用的结果,并且伴随着用户态向核心态的演变,在此过程中还可以调用与进程运行环境有关的函数,比如 sleep()函数。
- 驱动程序的下半部分,即中断服务子程序
Linux设备分类 (用C表示设备)
- 字符设备
- 块设备
- 网络设备
应用程序操作设备框图
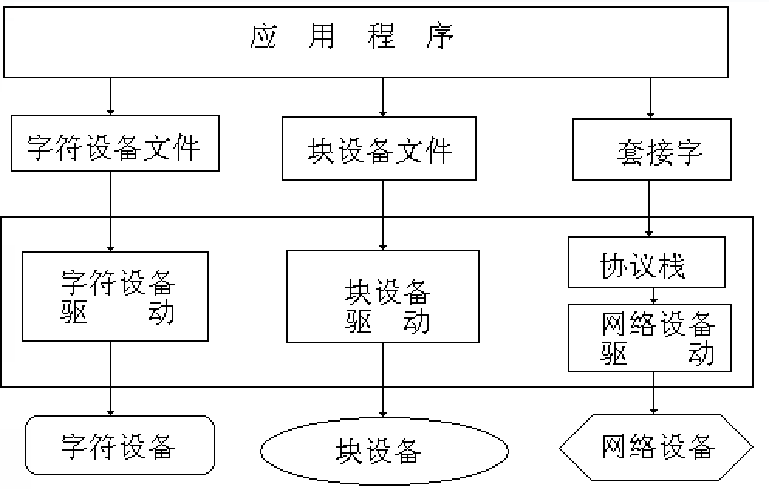
简述驱动程序和应用程序的区别
第一,应用程序一般有一个main函数,并从头到尾执行一个任务;驱动程序没有main函数,它在加载时,通过调用module_init宏,完成驱动设备的初始化和注册工作之后便停止工作,并等待被应用程序调用。
第二,应用程序可以和GLIBC库连接,因此可以包含标准的头文件;驱动程序不能使用标准的C库,因此不能调用所有的C库函数,比如输出函数不能使用printf,只能用内核的printk,包含的头文件只能是内核的头文件,比如Linux/module.h。
第三,驱动程序运行在内核空间(又称内核态)比应用程序执行的优先级要高很多。应用程序则运行在最低级别的用户空间(又称用户态),在这一级别禁止对硬件的直接访问和对内存的未授权访问。
应用程序一般有一个main函数,并从头到尾执行一个任务; 应用程序可以和 GLIBC 库连接,因此可以包含标准的头文件; 驱动程序运行在内核空间(又称内核态),比应用程序执行的优先级要高很多。