电赛
以下笔记皆基于HAL库。
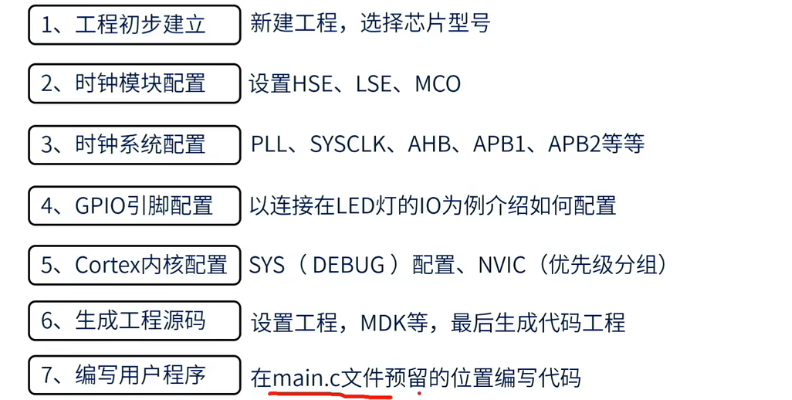
新建STM32CubeMX工程步骤
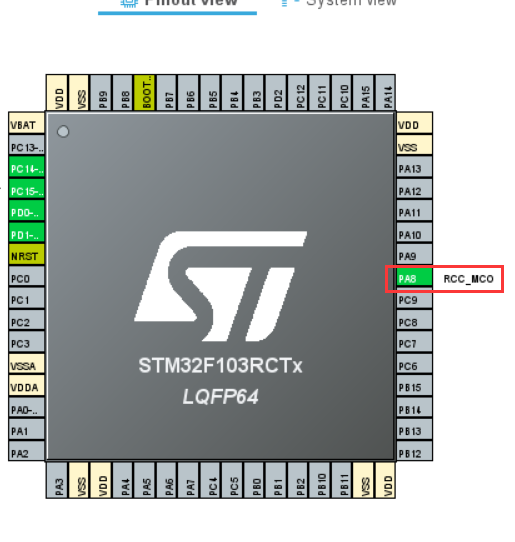
创建工程中如果勾选MCO表示向外部输出时钟,
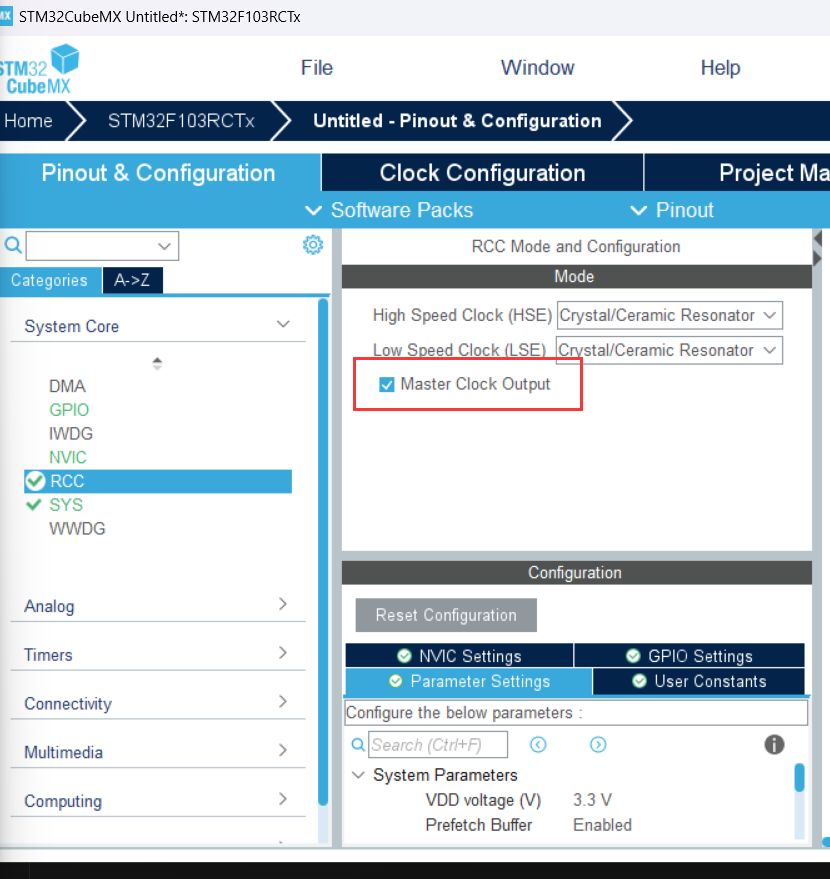 输出的是哪一个引脚可以查看,如下图。
输出的是哪一个引脚可以查看,如下图。
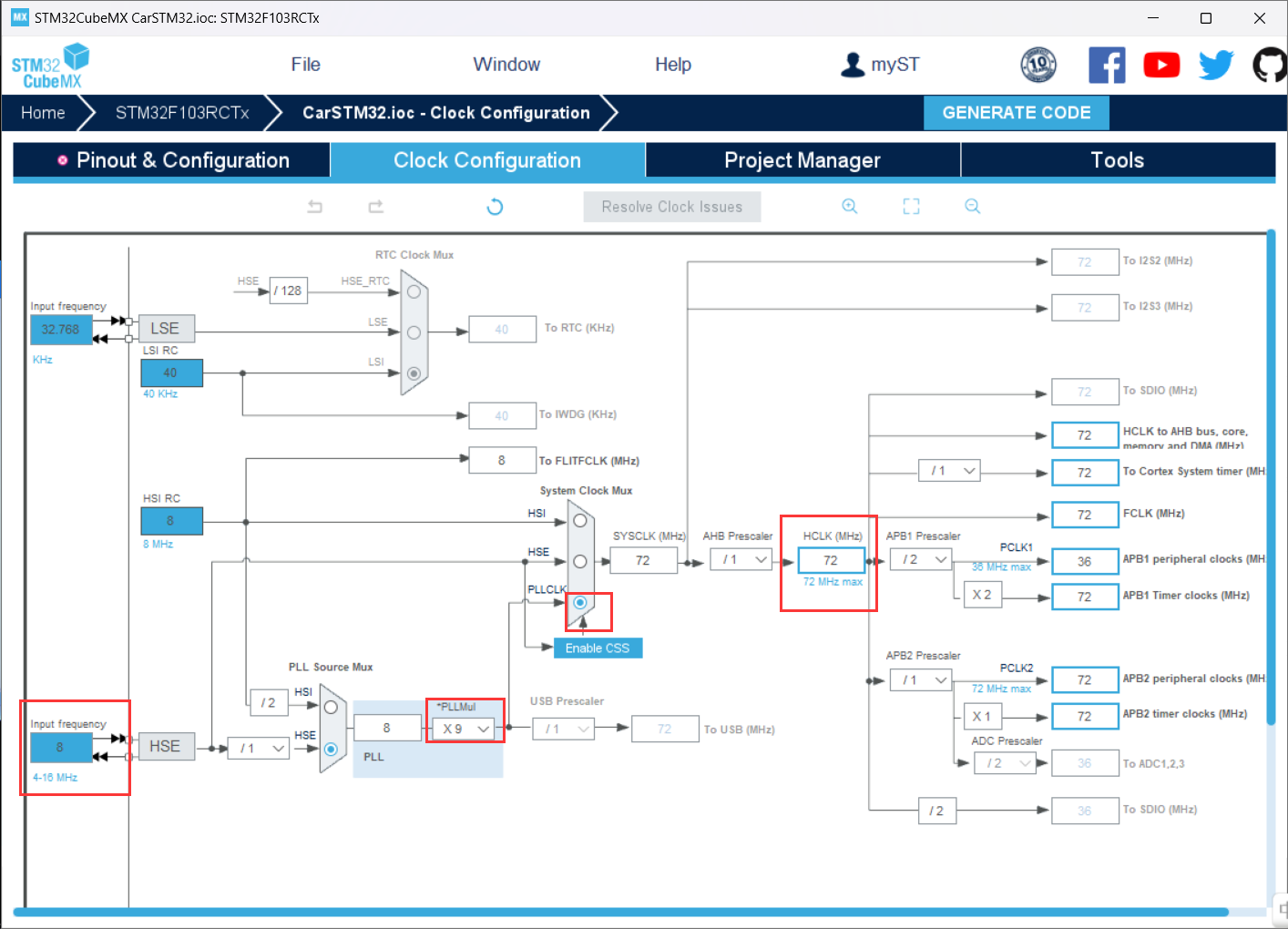
外部时钟设置
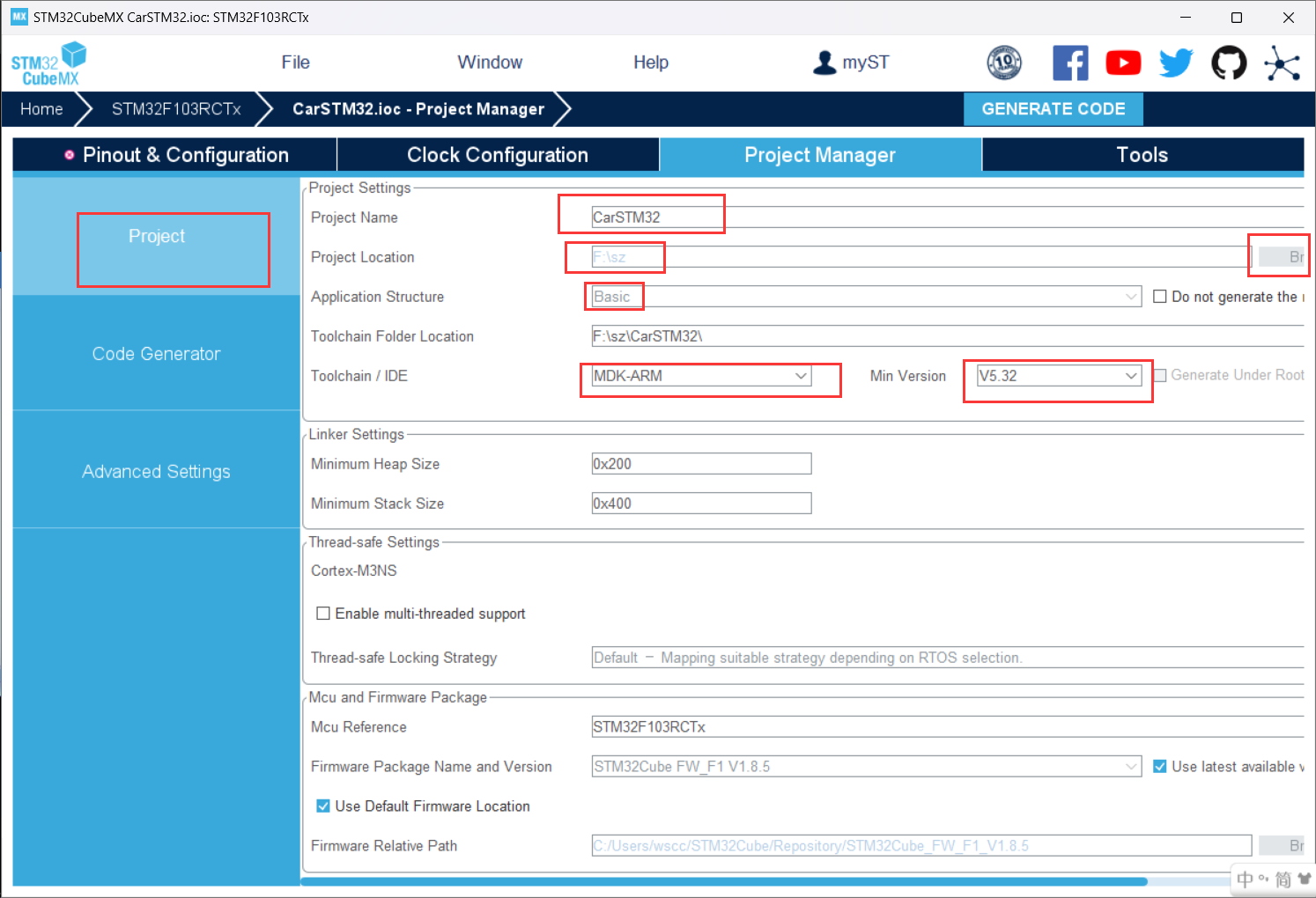
工程设置
如果Application Structure设置为Basic,那么会把下面的两个文件分开放
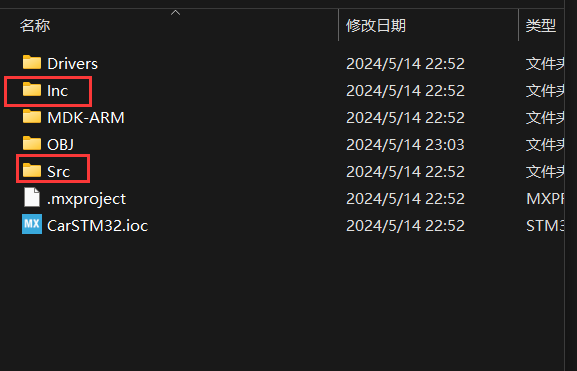 否则项目会把两个文件放在一个文件夹里,如Core
否则项目会把两个文件放在一个文件夹里,如Core
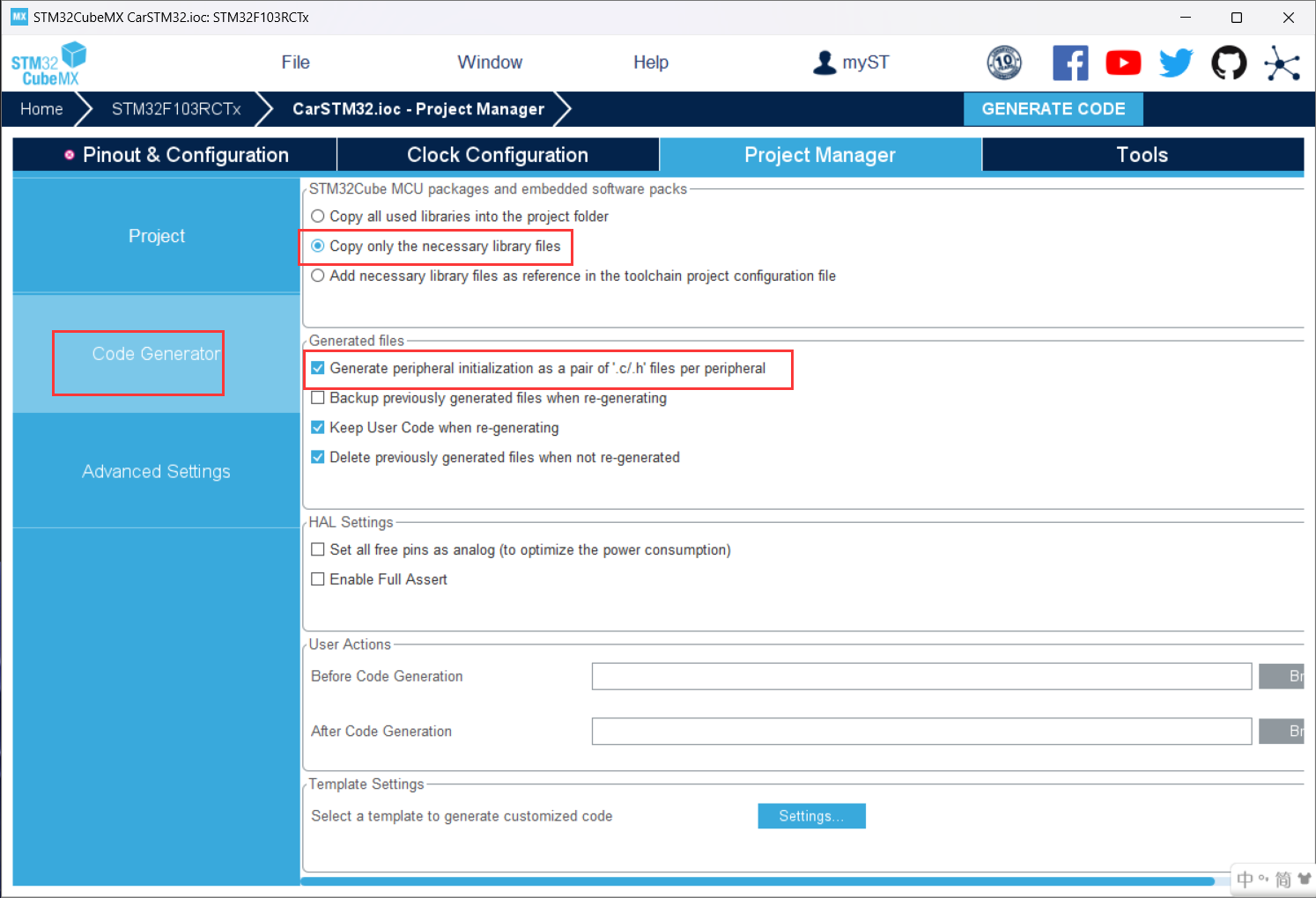
最后还需要设置Code Generator,如下:
时钟
1.初识时钟周期
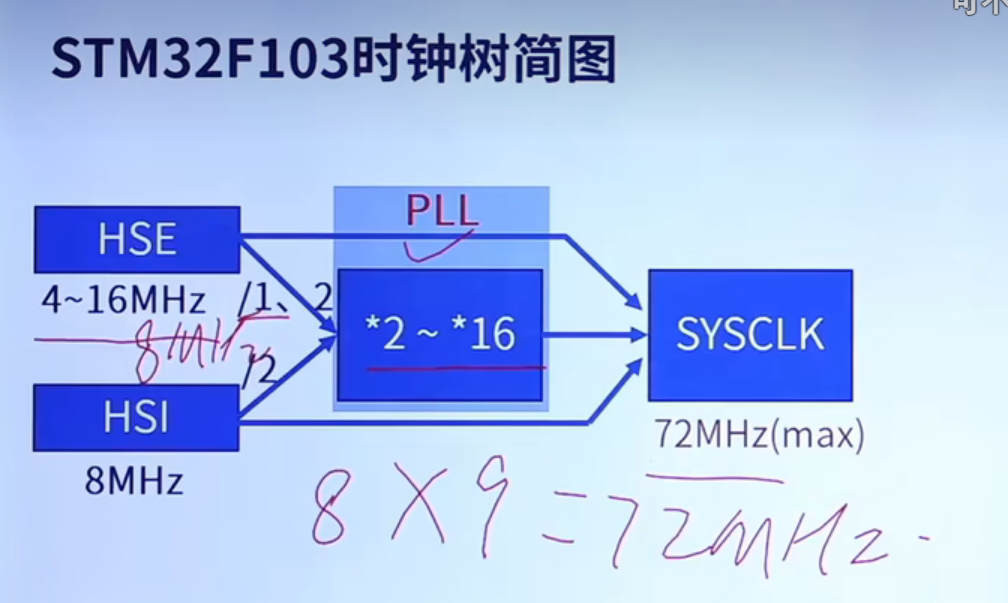
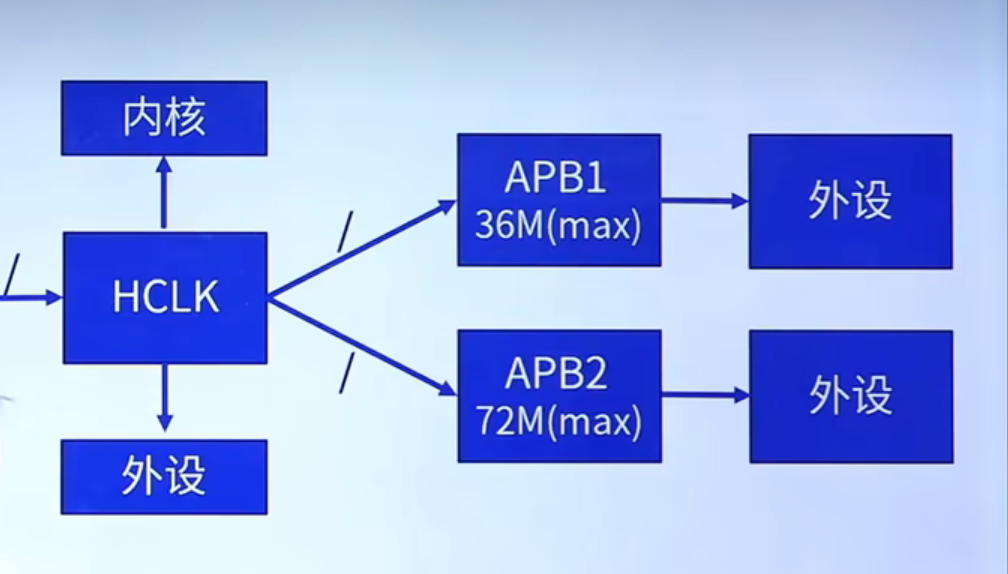
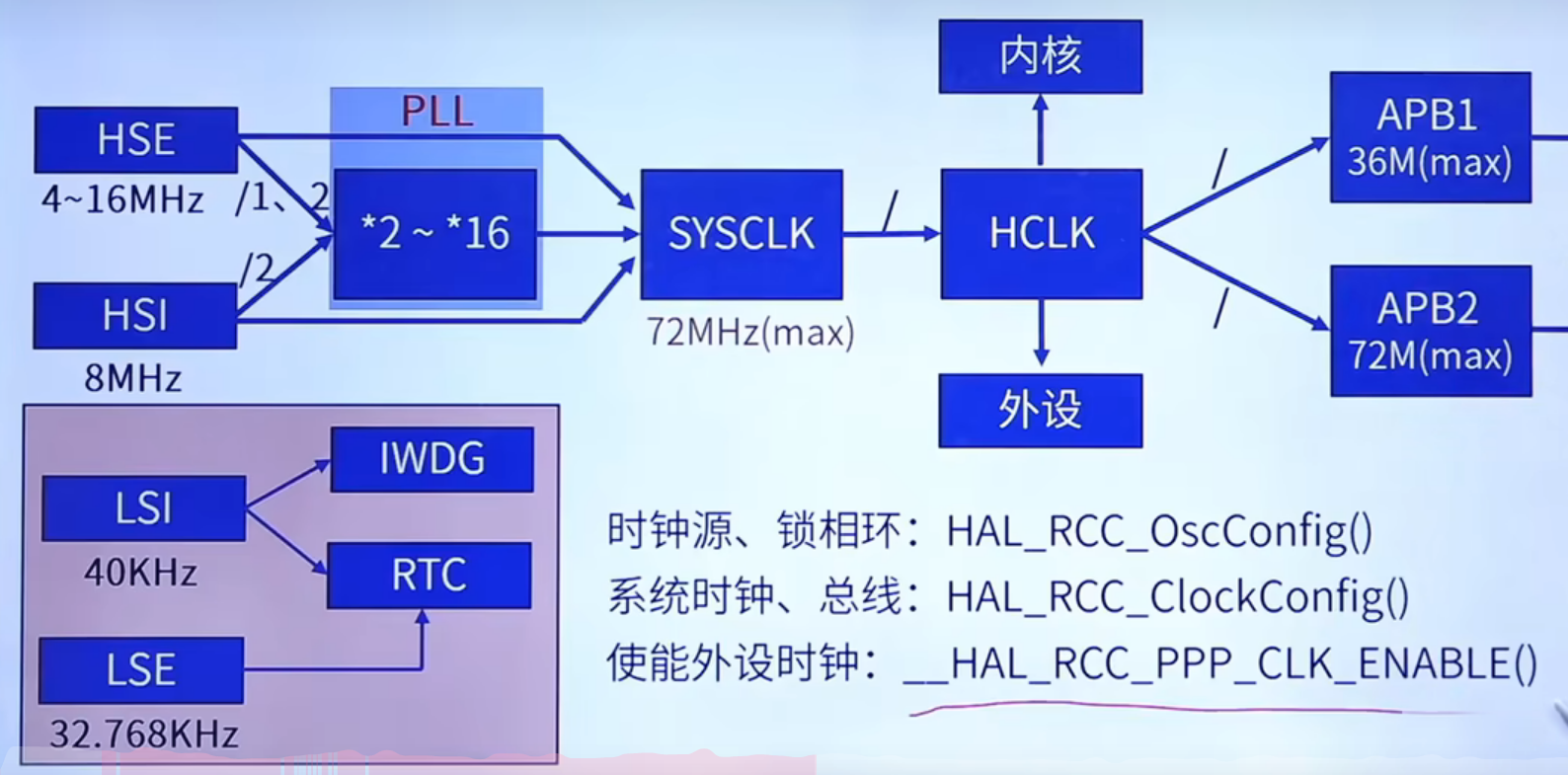
2.时钟树
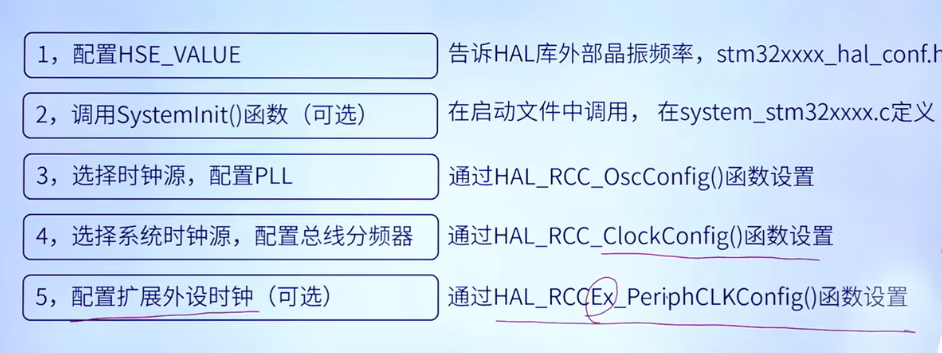
3.时钟配置步骤
4.外设时钟使能和失能
5.sys_stm32_cloc_init()函数
-
HAL_RCC_OscConfig()
- HSE高速外设振荡器
- LSE
- RC振荡器,随着电压的变化而变化,所以需要一个检验值
- PLL锁相环
-
HAL_RCC_ClockConfig()

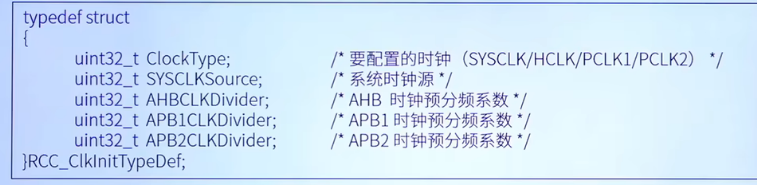
- 第一个参数
- 结构体中的第一个参数里的HCLK是指AHB总线、PCLK1是指APB1总线、PCLK2是指APB2总线,这个配置表示要配那条总线的时钟。
- 第二个形参

- F1系统时钟72MHz,如果使用72MHz访问闪存(Flash)那么是需要等待的,因为闪存的允许最大时钟频率是42MHz,所以需要等待,等待多少个周期需要下图
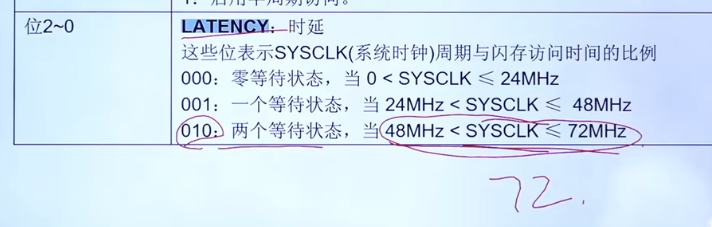
- F1系统时钟72MHz,如果使用72MHz访问闪存(Flash)那么是需要等待的,因为闪存的允许最大时钟频率是42MHz,所以需要等待,等待多少个周期需要下图
- 第一个参数
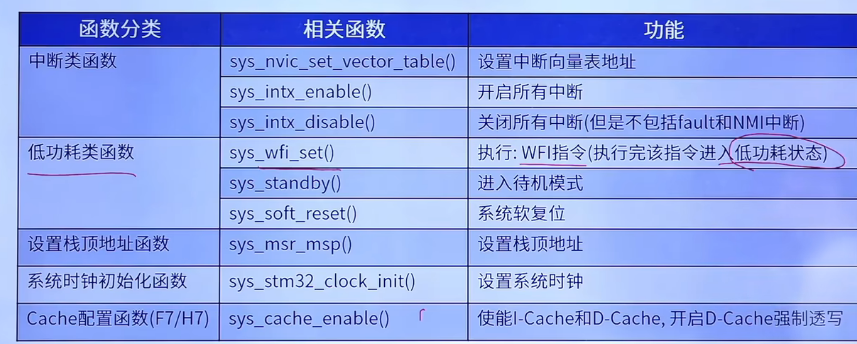
6.SYSTEN文件夹
- sys文件夹
NVIC介绍
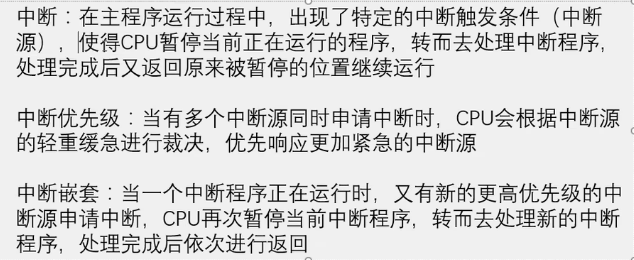
中断基本概念

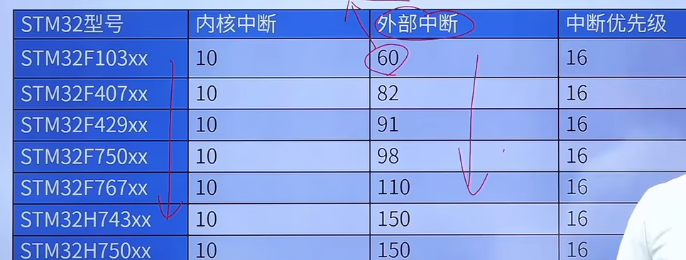
中断向量表

文件里的中断在哪里呢?
在文件startup_stm32f10x_hd.s中这里列出内部中断,外部中断就在内部中断之下,这里不再列出。
__Vectors DCD __initial_sp ; Top of Stack
DCD Reset_Handler ; Reset Handler
DCD NMI_Handler ; NMI Handler
DCD HardFault_Handler ; Hard Fault Handler
DCD MemManage_Handler ; MPU Fault Handler
DCD BusFault_Handler ; Bus Fault Handler
DCD UsageFault_Handler ; Usage Fault Handler
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD SVC_Handler ; SVCall Handler
DCD DebugMon_Handler ; Debug Monitor Handler
DCD 0 ; Reserved
DCD PendSV_Handler ; PendSV Handler
DCD SysTick_Handler ; SysTick Handler中断寄存器
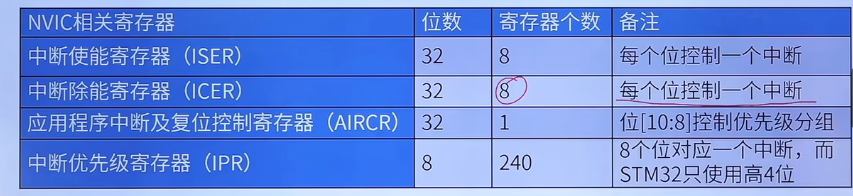
中断原理
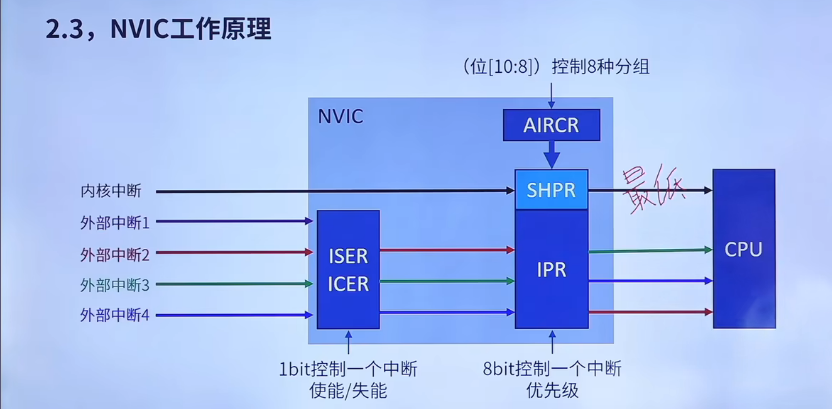
中断优先级

 响应优先级又叫子优先级
响应优先级又叫子优先级
中断的抢占优先级由AICR寄存器的后三位控制,而响应优先级由IPRx寄存器的后四位控制,最终分配结果参考下面的表格

中断一般只设置一次,设置多次可能会导致中断紊乱,一般以最后一次的中断设置为准,详细说明参考手册4.4.5
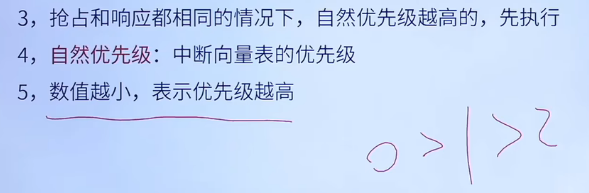
中断执行的顺序:抢占优先级(先执行数值小的)————响应优先级(先执行数值小的)————自然优先级(先执行数值大的)
NVIC 的使用
以下笔记皆基于标准库。
标准库中额中断
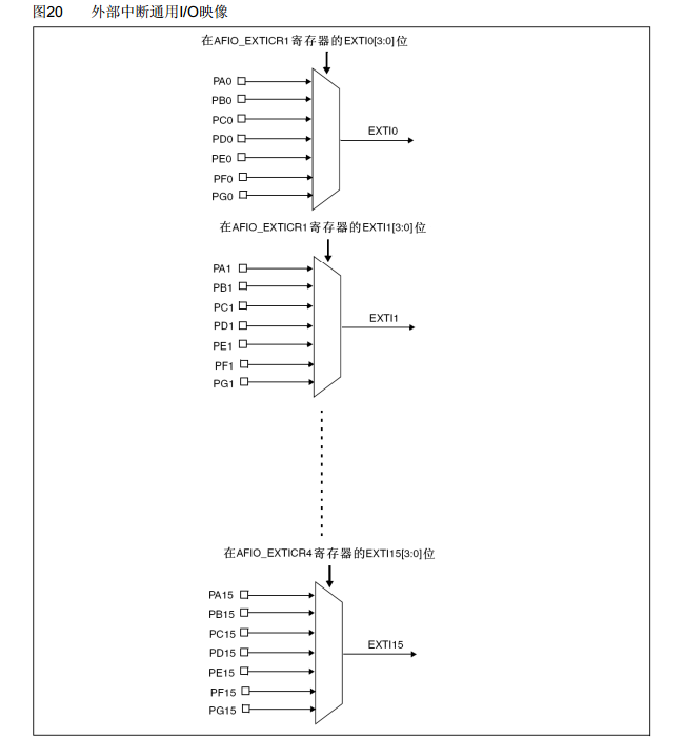
EXTI(Extern Interrupt)外部中断
EXTI可以监测指定GPIO口的电平信号,当其指定的GPIO口产生电平变化时,EXTI将立即向NVIC发出中断申请,经过NVIC裁决后即可中断CPU主程序,使CPU执行EXTI对应的中断程序
简而言之,gpio电平发生变化时,申请外部中断。
- 支持的触发方式:上升沿/下降沿/双边沿/软件触发(引脚没有发生变化,执行一段代码就申请中断)
- 支持的GPIO口:所有GPIO口,但相同的Pin不能同时触发中断(如PA1,PB1,PC1不能同时触发中断)
- 通道数:16个GPIO_Pin,外加PVD输出、RTC闹钟、USB唤醒、以太网唤醒
- 触发响应方式:中断响应/事件响应(事件响应不会触发中断。而是触发别的外设操作。属于外设之间的联合工作)
AFIO复用IO口
主要用于引脚复用功能的选择和重定义
在STM32中,AFIO主要完成两个任务:
- 复用功能引脚重映射
- 中断引脚选择
EXTI实现代码
这段代码的中断端口是GPIOB_Pin14,所以需要将相关的传感器接到PB14这个端口
void CountSensor_Init(){
//配置RCC
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
//AFIO、
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
//EXTI、一直打开着不用配置打开时钟
//NVIC 一直打开着不用配置打开时钟
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_14;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource14);
//EXTI
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line=EXTI_Line14;
EXTI_InitStructure.EXTI_LineCmd=ENABLE;
EXTI_InitStructure.EXTI_Mode=EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger=EXTI_Trigger_Falling;
EXTI_Init(&EXTI_InitStructure);
//NVIC
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel=EXTI15_10_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=0;
NVIC_Init(&NVIC_InitStructure);
}
void EXTI15_10_IRQHandler(void){//中断函数
if(EXTI_GetITStatus(EXTI_Line14)== SET){
EXTI_ClearITPendingBit(EXTI_Line14);
}
}定时器
TIM(Timer)定时器
定时器可以对输入的时钟进行计数,并在计数值达到设定值时触发中断
16位计数器、预分频器、自动重装寄存器的时基单元,在72MHz计数时钟下可以实现最大59.65s的定时 不仅具备基本的定时中断功能,而且还包含内外时钟源选择、输入捕获、输出比较、编码器接口、主从触发模式等多种功能 根据复杂度和应用场景分为了高级定时器、通用定时器、基本定时器三种类型
使用内部时钟源实现中断(标准库中)
在编写代码前先看看定时器的实现原理图
- 基本定时器
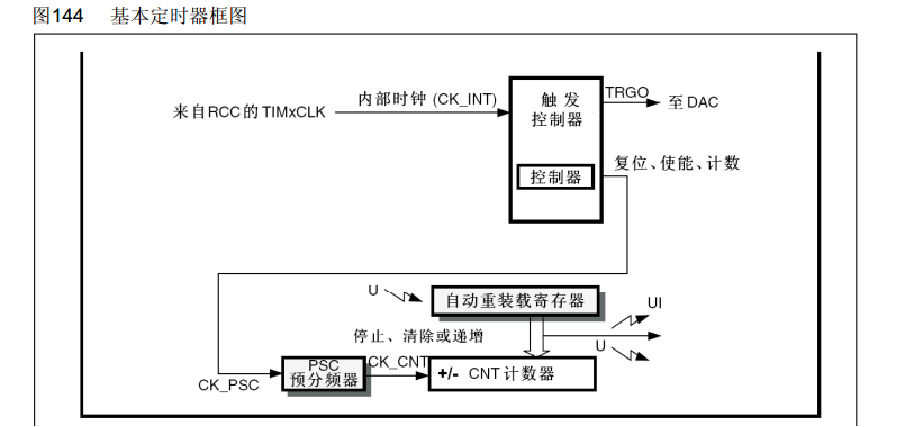
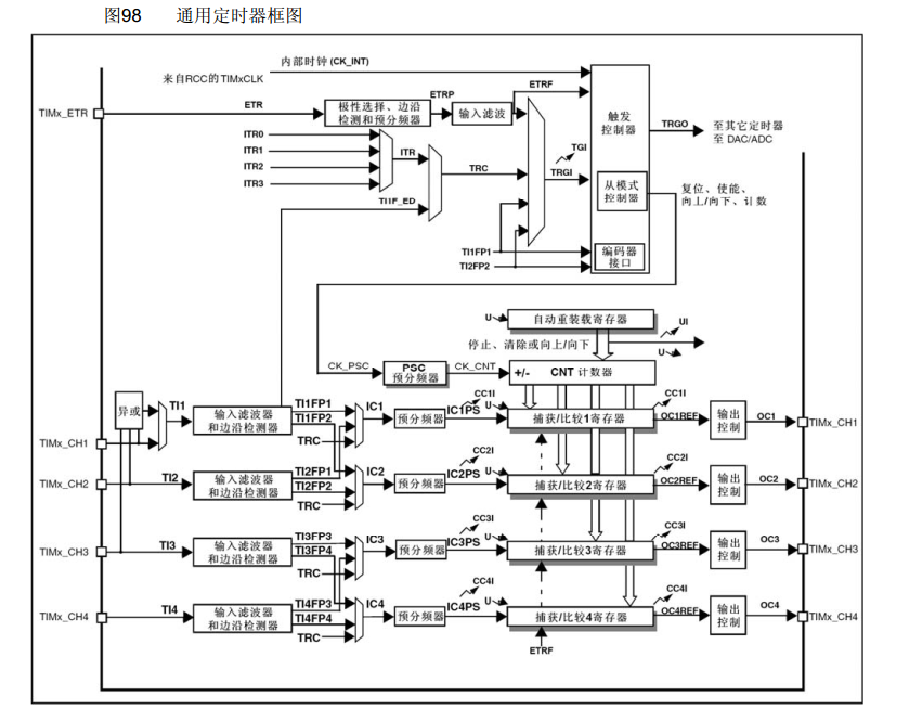
- 通用定时器
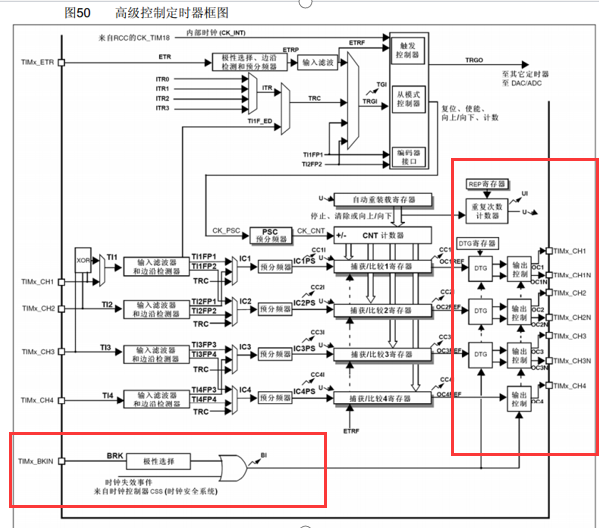
- 高级定时器(红色框出来的部分是高级定时器独有的)
此处主要参考通用计时器的结构图,下面是基于内部时钟RCC的定时器。
在 stm32f103xxx_rcc.c 文件对 RCC_APB1PeriphClockCmd 这样的介绍:
/**
* @brief Enables or disables the High Speed APB (APB2) peripheral clock.
* @param RCC_APB2Periph: specifies the APB2 peripheral to gates its clock.
* This parameter can be any combination of the following values:
* @arg RCC_APB2Periph_AFIO, RCC_APB2Periph_GPIOA,
……
……
……+
*/specifies the APB2 peripheral to gates its clock.即:指定APB 2外围设备到其时钟门。而这里的时钟门代码里选择了TIM2。
void Timer_Init(void){
//1.RCC
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
//2.选择时基单元时钟源,
TIM_InternalClockConfig(TIM2);
//3.时基单元
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1; //时钟分频,这里是1分频
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; //计数方式
TIM_TimeBaseInitStructure.TIM_Period=10000-1; //自动重装值,计数达到这个值后触发中断,然后重新开始计数
TIM_TimeBaseInitStructure.TIM_Prescaler=7200 -1; //预分频,计数频率,
//假设计数为1s则自动重装值可设置为10000,预分频可设置为7200,公式为秒数=27MHz/PSC/ARR
TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0; //重复计数数器高级定时器才有,这里设置为0
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure); //时基单元设置
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);
//4.中断输出控制
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //抢占优先级,0-3, 响应优先级0-3,一个工程只设置一次
//5.NVIC
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel=TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM2,ENABLE);
}
void TIM2_IRQHandler(void){
if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET){
Num++;
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
}
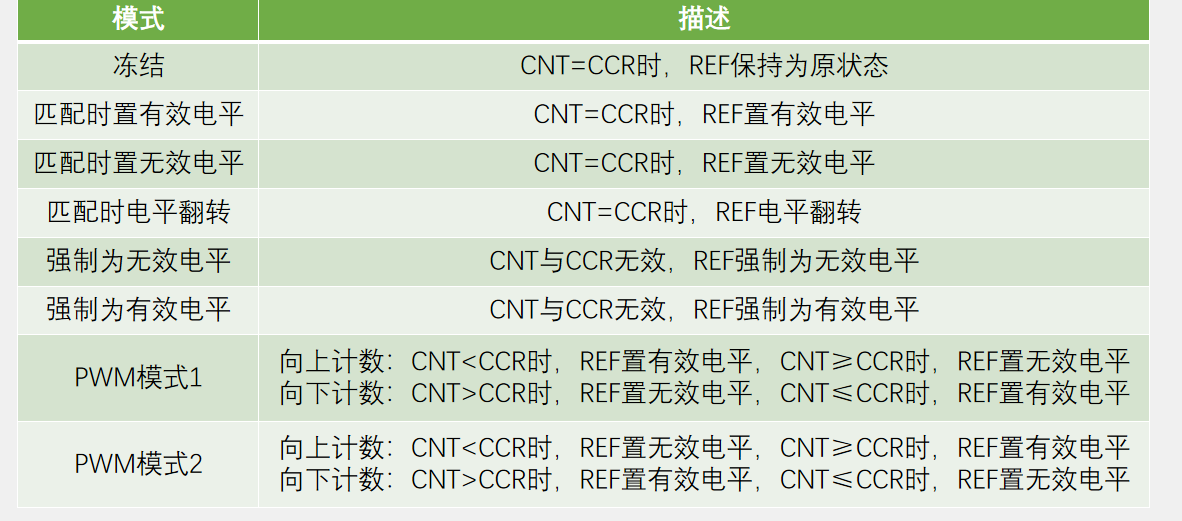
}实现输出比较
OC(Output Compare)输出比较
-
输出比较可以通过比较CNT与CCR寄存器值的关系,来对输出电平进行置1、置0或翻转的操作,用于输出一定频率和占空比的PWM波形
-
每个高级定时器和通用定时器都拥有4个输出比较通道
-
高级定时器的前3个通道额外拥有死区生成和互补输出的功能
-
OC:输出比较
-
IC:输入比较
-
CC:输入/输出比较
PWM波形
- PWM(Pulse Width Modulation)脉冲宽度调制,广泛应用于各种电子和电气系统中,用于控制功率转换、电机速度、信号传输等
- 在具有^1中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速等领域 ^1
- PWM参数:
- 频率 = 1 / TS
- 占空比 = TON / TS
- 分辨率 = 占空比变化步距
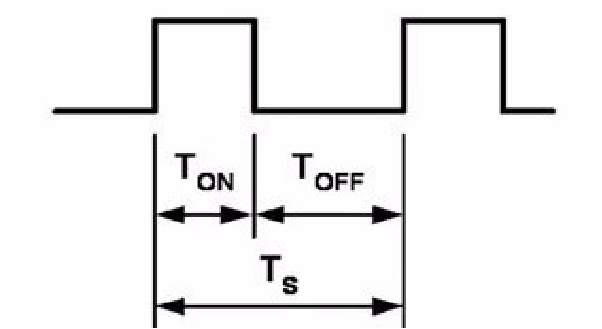 一些电平变化图可以等效为图中的虚线。
一些电平变化图可以等效为图中的虚线。

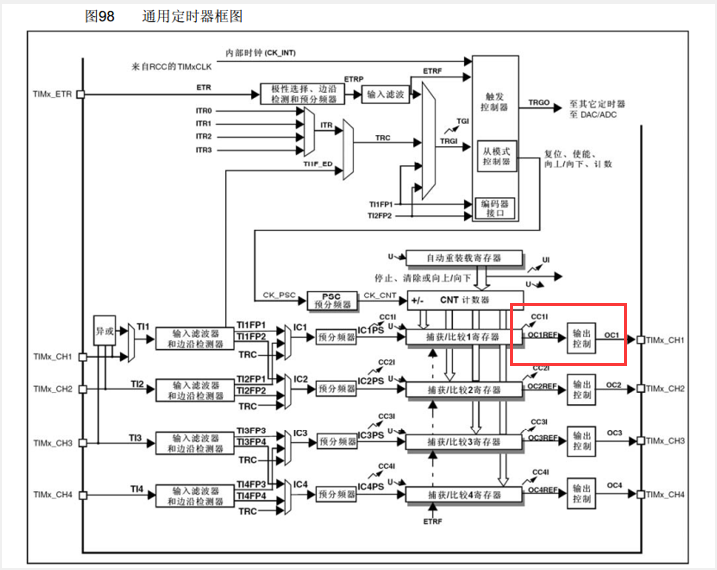 上图框出来的部分具体如下图:
上图框出来的部分具体如下图:
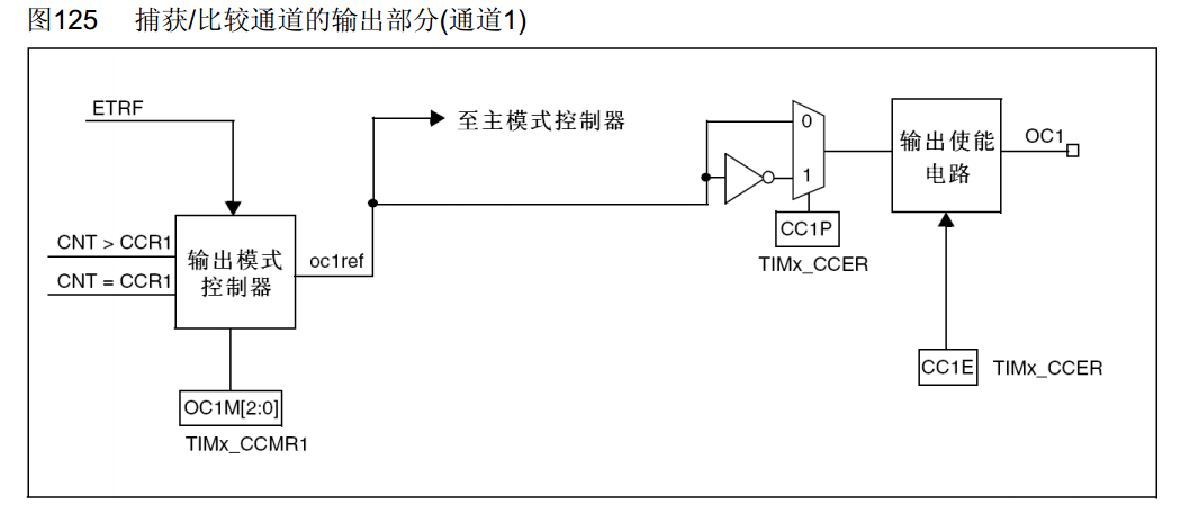
在信号通过比较后输出到CC1P,然后再输出到输出使用电路,输出使用电路的OC1可以查看引脚定义表
在上图中需要注意的一些引文缩写:
- REF 是reference的缩写。意思是 参考信号
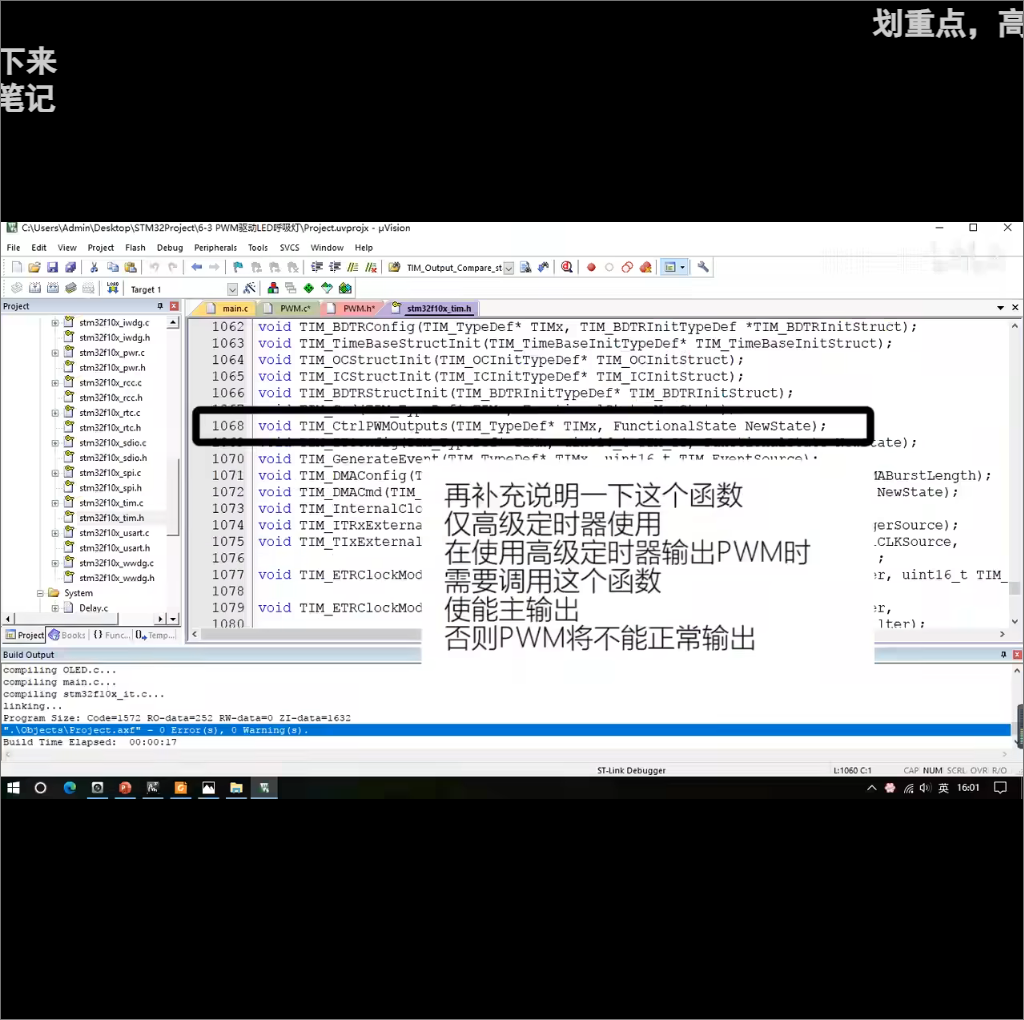
输出比较的设置
设置的函数为
PWM基本结构
配置PWM的时候可以参考下面的图,
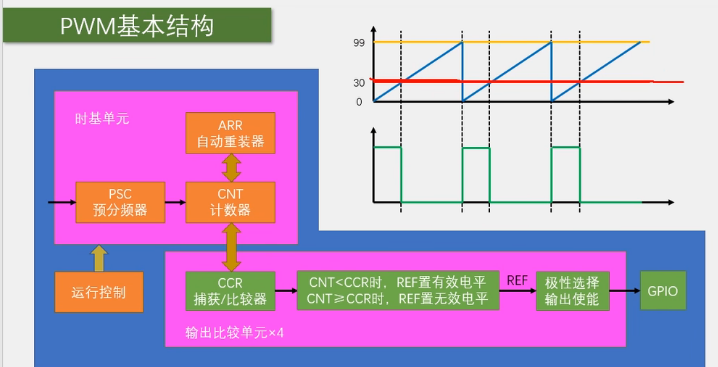 图中的参考坐标系图红色线表示CCR的值,蓝色线表示CNT的值,黄色线表示自动重装载值即ARR。
了解了这点后我们再看看PWM的是如何计算的,如下公式
图中的参考坐标系图红色线表示CCR的值,蓝色线表示CNT的值,黄色线表示自动重装载值即ARR。
了解了这点后我们再看看PWM的是如何计算的,如下公式
PWM频率: [ \text{Freq} = \frac{CKPSC}{(PSC + 1) \times (ARR + 1)} ] 可以看出PWM的频率等于CNT的更新频率
PWM占空比: [ \text{Duty} = \frac{CCR}{(ARR + 1)} ]
PWM分辨率: [ \text{Reso} = \frac{1}{(ARR + 1)} ]
代码编写